http://www.boutiquevizique.com/BV/dustbunnies.html
// Boutique Vizique
being lost
quote from ‘A Field Guide to Getting Lost’, by Rebbeca Solnit
(The word “lost” comes from the Old Norse los, meaning the disbanding of an army, and this origin suggests soldiers falling out of formation to go home, a truce with the wide world.!)
“Leave the door open for the unknown, the door into the dark. That’s where most important things come from, where you yourself came from, and where you will go.”
In 1994, we met at the Royal Academy of Fine Arts in Ghent Belgium, where we both studied photography. Neither of us was really practicing the profession when, in 2000, we put our computers side-by-side into the living room to work together on a VJ-set. I think we were totally ‘lost’ at that point. We created this setting that felt like coming home to us, but we had no clue about what we were really doing. It turned out that in the next 3 years, those computers stayed there in that living room. And looking back, I think that is about the only thing that stayed the same. Generally, our work process would look like this. We would engage in some sort of soft- or hardware for a while and when we sort of ‘controlled’ it, move onto something else, something new. Often we would force ourself into some project we had no experience at all with. It resulted in a series of short videos, TV commercials, some graphic design and a long series of VJ-sets. Trying to make a living out of it and at the same time learning all these new tools.
realtime video processing
And that’s how it went on. We were doing a lot of video in collaboration with several musicians, but missed the possibility to change our images on the fly.
So, we started writing our own AV software, in the Max/Msp/Jitter programming environment , to create the desired results. During several AV performances we would basically be on top of the musicians, trying to get some sort of input from their actions. When we reached the point where their sound influenced our images directly, we realized that our presence on stage was not important anymore.
Well, … what if we turn the audience into the performer.!
audience as performer
Originally still working with video as the main medium, our work all of a sudden became 3-dimensional. This was a big change for us and we both look back to those early experiments with a blush on our face. Somehow we were lucky to let things sprout out of these early try-outs. Several of our installations have gone through a series of development in order to become what they are today. We were given multiple chances to fail, try, and fail again.
Soon we realized that the most interesting aspect of this kind of art work is that the line between creator and the audience becomes blurry. Every visitor lives in his/her personal universe and while interacting with the installation awakens part of that world and shares it with the other people that are present.
And that is one of the initial ideas from which our Dustbunnies arose.
// Dustbunnies
So, our goal was to create an interface that would allow both individual and multi-user interaction. As a reflection of human social behavior, we came up with the idea to create a group of separate, but similar interfaces that would behave as a group itself. Their internal communication became the centre of our focus creating an installation that - in it’s reactive behavior - emphasizes the visitor to consider their own actions and movements. As a result, communication - in whatever form - among the different visitors, young and old, is inevitable.
tools are toys are tools are ..
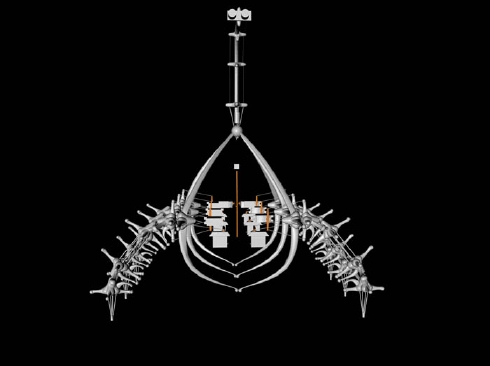
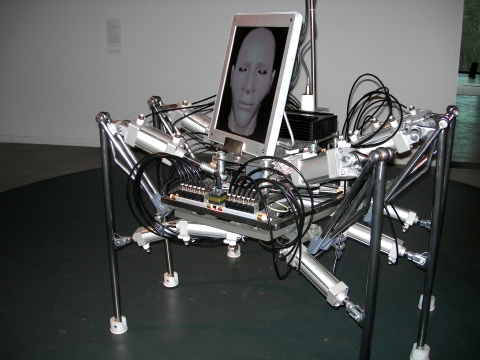
Technically the dustbunnies are seven ball shaped, soft sculptures that contain a whole set of electronic components. and although we use some of the latest technology, all this is hidden as far as possible. It’s their guts and brains, but just like ours no fun to look at. Yet, we care about all the pluses and minuses cause it gives them a soul that gets reflected in their actions. Their cute look aims to brake social boundaries more easily; and playfulness is a returning element in all of our work.
In order to penetrate their mysterious world you have to give up some of your own personal freedom. If that’s out of question, you may try to reveal their secrets by taking a closer look. but be careful.! As soft as they look and feel; touching a dustbunny will cause a furious screaming by all members of the colony. The whole group will show their dislike. By doing so they stimulate a certain group exploration by the visitors. One person interacting will cause a total different reaction then a group intervention.
// Q&A
future.?
A major change happened within the Boutique Vizique structure in 2003. Fifty percent of our little collective moved to another country far away. The other fifty percent stayed loyal to the home base.!
Originally, our practice consisted mainly of interventions together with other artists. As it turned out, this colaborative aspect became less important at the moment we geographicaly parted. Our woolgathering however survived and focussing more on our own personal ways of expression. It engendered a series of affable interactive installations and we hope to go on for a long time.!