DAVID GAMEZ
DEVELOPING CONSCIOUS ROBOTS
This talk outlines the work that is being done at the University of Essex and the University of Bristol on an EPSRC Adventure Fund project to build a conscious robot. Given the early state of consciousness research and no hint of a solution to the so-called hard problem, this might appear to be a rather premature and preposterous project. However, there are some grounds for thinking that a start could be made on the development of machine consciousness. These include rapid progress in our knowledge about consciousness, a large body of work on the neural correlates of consciousness and the establishment of a number of theories about consciousness that have a substantial amount in common. All of this suggests that although we cannot design a conscious robot in the same way that we can design a red robot, we can at least build a robot that includes many correlates of consciousness and which will be attributed some form of consciousness by a majority of the mainstream theories.
To maximise the chances of consciousness in the robot we are pursuing a biological approach wherever possible and the design of the robot’s body and ‘brain’ has been closely based on the human body and brain. Human beings are the paradigmatic examples of conscious creatures, and so it can be argued that a close copy of the human body and brain is more likely to become conscious than artefacts with little or no connection to human biology – something that is especially true if consciousness is an emergent phenomenon.
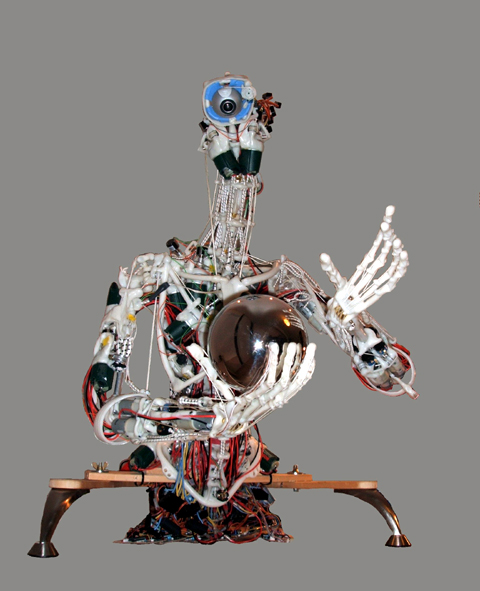
The main components of this project are a hardware robot called CRONOS, a virtual copy of this robot known as SIMNOS, a spiking neural simulator (SpikeStream) and a systematic approach to describing the synthetic phenomenology of the system. After covering each of these in more detail I will explain how we plan to identify signs of consciousness in the robot and finish with an outline of previous work in this area and some directions for future work on machine consciousness.